![]()
App Inventor开发
App Inventor 2
Android应用开发者(英语:App
Inventor)是一款卡通图形界面的Android智能手机应用程序开发软件。它起先由Google提供的应用软件,现在由麻省理工学院维护及营运。
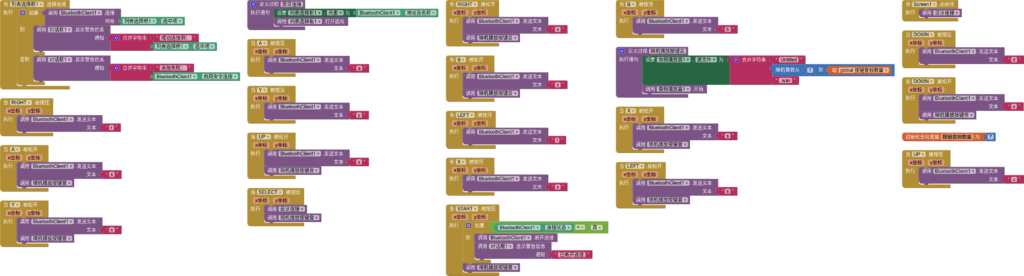
借助IA2 建立一个简易的游戏手柄。因为AI2
的蓝牙串口通讯协议是基于SPP(Serial Port
Profile)串行端口配置。我们目的是并设定相对应代码,在手机发送,在树莓派解析,并对小车进行运动控制。
对应代码如下:
u –> 前进 gofront()
d –> 后退 goback()
l –> 左转 turnleft()
r –> 右转 turnright()
s –> 停止 istop()
每次代码运行周期为20ms
![]()
ai2截面图
![]()
树莓派蓝牙SPP设置
树莓派蓝牙配置
安装支持包
1
2
| sudo apt-get install pi-bluetooth
sudo apt-get install bluetooth bluez blueman
|
添加pi用户到蓝牙组
1
2
| sudo usermod -G bluetooth -a pi
service bluetooth status
|
启动/增加SPP
1
| sudo nano /etc/systemd/system/dbus-org.bluez.service
|
修改内容如下:
1
2
| ExecStart=/usr/lib/bluetooth/bluetoothd -C
ExecStartPost=/usr/bin/sdptool add SP
|
重启,启动蓝牙串口
串口调试软件xgcom
1
2
3
4
5
6
7
| sudo git clone https://github.com/helight/xgcom.git
sudo apt-get install make automake libglib2.0-dev libvte-dev libgtk2.0-dev
cd xgcom
sudo ./autogen.sh
sudo make
sudo make install
xgcom
|
![]()
展示与控制代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
| import serial
import time
from btbu_robot.motor import motor
bluetooth = serial.Serial("/dev/rfcomm0",9600,timeout=0.5)
left = motor(22, 27, 17)
right = motor(24, 23, 18)
def gofront():
left.run(70)
right.run(70)
def goback():
left.run(-70)
right.run(-70)
def turnleft():
left.run(-70)
right.run(70)
def turnright():
left.run(70)
right.run(-70)
def istop():
left.run(0)
right.run(0)
status = ''
if __name__ == '__main__':
while True:
data = bluetooth.readline().decode('utf-8')
if status == 'u':
gofront()
elif status == 'd':
goback()
elif status == 'l':
turnleft()
elif status == 'r':
turnright()
elif status == 's':
istop()
while data != '':
status = data[0]
if status == 'u':
gofront()
elif status == 'd':
goback()
elif status == 'l':
turnleft()
elif status == 'r':
turnright()
elif status == 's':
istop()
data = data[1:]
time.sleep(0.02)
time.sleep(0.02)
|